先来看一段描述:
PID控制器(Proportion Integration Differentiation)
俗称比例-积分-微分控制器,分别由比例单元(P)、积分单元(I)和微分单元(D)组成。一般来说,通过调整这三个单元的增益Kp,Ki和Kd来确定PID控制特性。其实PID控制器是一类控制器,而其实控制器有很多种,比如:P控制器,PI控制器,PD控制器等。
▲PID控制示意图
具体的传递函数就是三项加起来:PID(s) = Kp + Ki/s+ sKd
比例项就是误差与比例参数的乘积,积分项就是过去一段时间内积累的误差和。微分项是未来一段时间误差的变化。
看到这里很多工友就已经脑袋晕了,别慌,继续看下去你就明白了。
PID控制器主要适用于基本上线性,且动态特性不随时间变化的系统。然而,PID控制器的厉害就在于它就是一个公式打天下,即只要用按公式计算,就能知道执行机构的具体动作,并且把受控系统控制在想要的位置。看到这里,大家应该产生了一个新疑问,那么控制里讲的受控系统和执行器是指什么呢?
受控系统就是我们要控制的对象,当左侧手按弹簧的时候,当手松开,弹簧还能维持到一个固定的高度不变,这个过程是自稳定过程(不带积分特性的过程对象),属于自稳定受控系统。
而右侧如果用手去按一个橡皮泥,把手松开,橡皮泥软在桌面上恢复不了原来的高度,这个过程是一个非自稳定过程(带积分特性的过程对象),属于非自稳定受控系统。
▲赛跑问题PID控制流程图
▲执行周期设定过小
所以大家看出来了,要想完成好比赛,我们需要对阿喀琉斯的加速能力有很充分的了解。他虽是古希腊英雄,但一定不是神。这就和我们玩游戏需要看一下英雄的能力面板一样,而提升能力需要不同模式的打怪升级,每次升级之后,还需要再去Check下英雄的能力值是如何提升的。
我们用两张图表,来看一下,当对阿喀琉斯下达命令之后,他会有什么样的执行能力,下边两张图示中,第一张图表中的横轴代表时间,纵轴代表对阿喀琉斯的指令。第二张图表是同一个时间范围内,阿喀琉斯的实际动作情况。
如果控制器具有PID结构,则积分作用时间的设置和微分作用时间的设置通常会相互结合。比率TI/TD介于4和5之间,这对于大多数受控系统都是最优的。
对于PI和PID控制器,如果大部分情况下选择的积分作用时间TI过短,则会发生控制振荡。如果积分作用时间过长,则会降低干扰的稳定速度。因此,不要希望进行第一次参数设置后,控制回路工作状态就能达到“最优”状态。经验表明,当系统处于Tu / Tg > 0.3 “难以控制”状态时,进行调整是很必要的。
那么除了经验参数,有没有办法让控制器自动寻找PID参数呢?当然也有,西门子S7-1200和S7-1500系列PLC都支持PID自调节功能。
只要连接好受控系统输出的执行机构,做好设定值和反馈值的连接,就可以开始做自动寻找参数的过程了。寻找参数可以分为预调节和精确调节。
预调节功能可确定对输出值跳变的过程响应,并搜索拐点。根据受控系统的最大上升速率与时间计算PID参数。可在执行预调节后再执行精确调节时获得最佳PID参数。
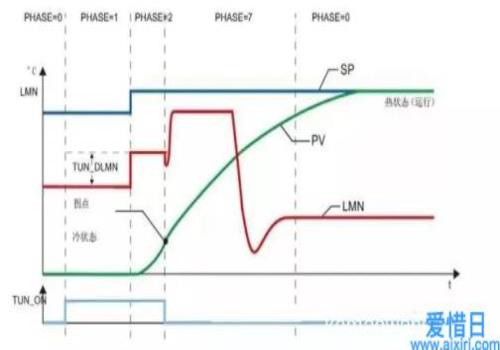

▲PID预调节的七个阶段图
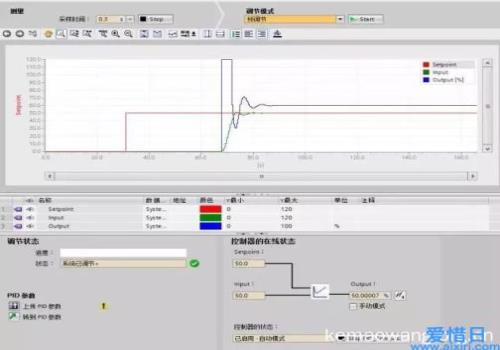
▲PID预调节的具体过程图
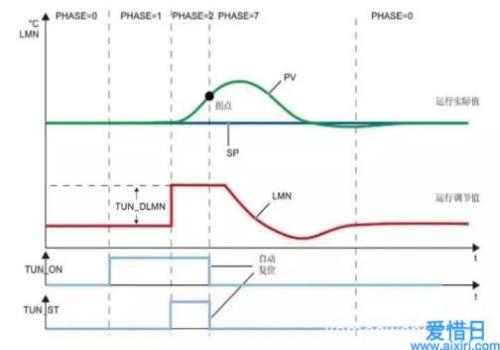
▲PID精确调节的阶段图
▲PID预调节的具体过程图
如果很多情况下不能具备连接现场实际设备来做PID参数自整定,也可以用一个功能块通过PLC程序仿真一下执行机构,将仿真的执行机构执行的效果连同PID控制块进行离线的参数自整定,当然这样做出来的参数只是为了验证逻辑和学习控制器,到真实的项目应用还需要重新做自整定的。
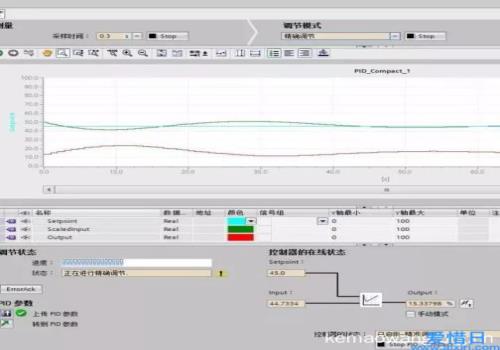
具体仿真过程需借助西门子博图软件的“PID_Compact”块和“LSim”仿真库,图为 S7-1500 实现一个闭环控制系统。PC 站用于将控制回路可视化,PG 用于组态。
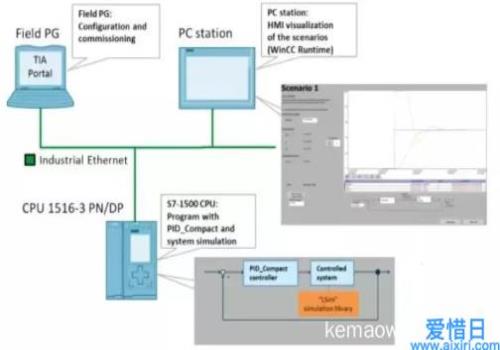
▲离线仿真PID过程对象模拟
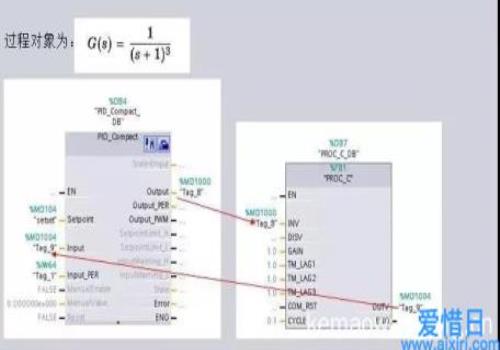
▲离线仿真PID过程对象模拟
大家可能会好奇自控原理在生活里的应用是什么?水壶烧水自动断电,冰箱压缩机的启停等、马桶的自动冲水、变频空调,都源自自控原理最简单的PID控制,其实现实中,我们虽然都在使用反馈的思想,就比如人们常说的和面,怎么能知道面和水的比例是多少呢,就靠手来感觉,面多了加水,水多了加面。这种系统就是非自调节的受控系统,如果掌握不好度水会一直加下去。又不能把多加的水抽出来,所以只能下次积累点经验,这次的不调节范围放大,水多就水多点吧也不加面了。用结果指导下次的动作但很难找到完全的合适的受控系统。
PID原理是清楚了,至于什么情况用什么PID模型,还是查表,我们家用的水壶烧水控制的物理量是温度,看上面表格推荐PD是非常适用,为什么呢?因为目前咱们的温度检测点比较慢,水都已经到设定温度了,检测的温度还没到,或者水壶都已经断电了,温度还在上升,这都是滞后造成的。
总体说来,PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。但是,PID也不是全能的哦。很重要的一点是因为, PID控制器主要适用于基本上线性,且动态特性不随时间变化的系统,但是对复杂非线性系统和复杂信号追踪,还是有局限性的。
以上就是久久派网»pid参数整定方法及其优缺点(pid整定详细步骤)的相关内容了,更多精彩请关注久久派号公众号。
声明:本文由久久派网【创业者资源平台】作者编辑发布,更多技术关注久久派技术!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容,请发送邮件至 55@qq.com 举报,一经查实,本站将立刻删除。转转请注明出处:https://www.szhjjp.com/n/83687.html